随着机器人变得越来越先进和负担得起,更多的人可以开始将它们引入他们的家中。因此,许多机器人专家一直在尝试开发可以有效帮助人类做家务的系统,例如做饭、清洁和整理。
伦敦帝国理工学院机器人学习实验室的研究人员最近开发了 NeatNet,这是一种创新的机器学习工具,可以让机器人以符合用户个人喜好的方式整理家庭环境。该模型在 arXiv 上预发表的一篇论文中提出,基于一种具有图神经网络层的新变分自动编码器架构。
“每个人都以独特而个性化的方式布置自己的家,这受到某人是左撇子还是右撇子、他们的审美品味、习惯,甚至他们的文化背景的影响,”研究人员之一爱德华约翰斯博士说。退出研究,告诉 TechXplore。“我们开发了一种方法来学习人们对他们喜欢如何布置家的偏好,这样机器人就可以以个性化的方式整理他们的家。”
NeatNet 是由 Johns 博士和他的学生 Ivan Kapeyukh 开发的技术,它允许机器人学习用户独特的整理偏好,只需观察他们如何布置家中的家具和物品。然后,机器人可以使用这些偏好作为指导,以反映他/她偏好的方式来整理用户的家。
“例如,假设您更喜欢以紧凑的方式布置办公桌,以便可以轻松到达所有物品,”约翰斯博士说。“你可能想让机器人学习这个偏好。机器人整理好之后,你的办公桌会专门按照你方便的方式来安排。”
NeatNet 从推荐系统、流媒体平台(例如 Netflix、YouTube、Spotify)或其他网站使用的机器学习工具中汲取灵感,向用户推荐新内容。推荐系统的工作原理是根据用户过去观看、收听或访问的内容了解用户的偏好。
“如果许多用户观看了一部与您有相似偏好的新电影,那么 Netflix 可能也会向您推荐同一部电影,”约翰斯博士解释说。“这就是这些方法如何做出个性化推荐的方式。”
用于学习整理偏好的类似推荐的新工具基于 Kapeyukh 在伦敦帝国理工学院的 MEng 论文,该论文由 Johns 博士监督。Kapeyukh,现在是博士学位。在今年 11 月 8 日至 11 日在伦敦举行的机器人学习会议 (CoRL) 上,该大学的学生与他的导师一起展示了这篇新论文。
“到目前为止,我们已经使用机器人及其环境的计算机模拟展示了我们的结果,但在我们未来的工作中,我们计划在现实世界中的真实机器人上实现这一点,”约翰斯博士说。
一段简短的视频,总结了 NeatNet 如何学习整理偏好。图片来源:Ivan Kapeyukh 和 Edward Johns(伦敦帝国理工学院的机器人学习实验室)。
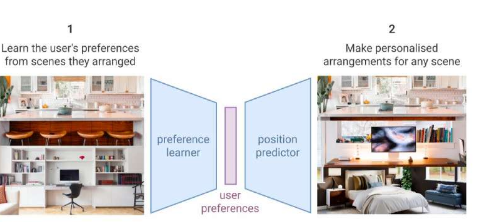
本质上,NeatNet 处理由用户安排和整理的场景。从这些场景中,它学习用户的整理偏好,这些偏好以数字序列表示。最后,它使用这些数字序列以个性化的方式排列任何一组对象。
“由于机器人事先不知道它会在一个场景中遇到多少物体,NeatNet 使用图神经网络来处理场景,”约翰斯博士说。“这意味着它不是直接从场景图像中学习,而是将场景建模为图形,其中每个对象都是一个节点(或一个点),并且所有节点都连接在一起。”
使用图神经网络,NeatNet 还能够学习不同对象之间的关系。例如,它可以了解到键盘和鼠标通常并排放置,或者餐具放在盘子的侧面。
除了学习一般的对象对对象关系外,NeatNet 还会查看个人用户偏好。例如,它可以了解用户通常将餐具放在盘子的哪一侧,因为惯用左手和惯用右手的人可能有不同的偏好。
约翰斯博士和卡佩柳克博士在一系列实验中评估了他们的技术,使用使用整理模拟器创建的房间布置示例,该示例捕获了 75 位不同用户的偏好。在这些测试中,NeatNet 始终如一地提供整洁和个性化的房间布置。
“我们发现以个性化的方式整理场景比让每个人都以相同的方式整理更能让用户满意,”约翰斯博士说。“即使对于简单的场景也是如此,在拥有数百个物体的现实家庭中,如何安排每个房间有更多的选择。”
当机器人变得更加普及时,它们以符合个人用户偏好的方式完成任务的能力可能特别有价值。因此,NeatNet 可能被证明特别有用,特别是对于提高家庭助理和机器人的性能。
“另一个有趣的发现是,虽然神经网络将用户的偏好表示为一系列数字,但我们仍然能够找到一些有意义的模式,”约翰斯博士说。“例如,NeatNet 决定根据他们布置餐桌的方式将左撇子和右撇子用户分开分组。这揭示了模型在内部的工作方式,这在使用神经网络时通常很难确定。”
到目前为止,NeatNet 仅在模拟中进行了测试,但它取得了非常有希望的结果。研究人员现在正在进行一项后续研究,旨在在真实机器人上应用和评估他们的方法。
“我们将在机器人上使用摄像头,即机器人的‘眼睛’,来检测房间中物体的位置,”约翰斯博士说。“此外,我们会考虑如何确保建议的布置在物理定律下始终是安全的。例如,盘子不应该翻到桌子的边缘。我们还将探索考虑到它需要多长时间的方法。 “让机器人来完成这项整理工作。例如,我们可能希望机器人只整理一些明显不合适的物品,而不是重新布置整个房子。”