生产最闪亮,最安全,最快速的自动驾驶汽车的狂热竞赛席卷了我们的轮椅,踏板车,甚至高尔夫球车。近来,从陆地到海洋的运动不断,因为海洋自治权正在改变我们城市的运河,并有可能在我们的水道上提供货物和服务以及收集废物。
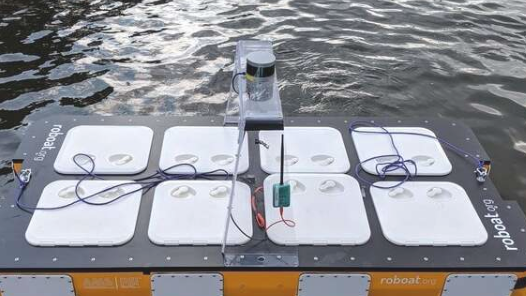
在麻省理工学院计算机科学与人工智能实验室(CSAIL)和感官城市实验室的五年项目的更新中,研究人员一直在为荷兰阿姆斯特丹市开发世界上第一批自动驾驶船队,并且最近还增加了一艘更大的新船:“ Roboat II”。新型机器人船现在长2米,大约是6英尺的“ COVID友好型”,能够载客。
除了阿姆斯特丹高级都市解决方案研究所,该团队还创建了导航和控制算法,以更新船只之间的通信和协作。
麻省理工学院麻省理工学院教授,有关Roboat的论文的资深作者Daniela Rus表示:“ Roboat II使用类似于自动驾驶汽车的算法来自动导航,但现在已经适用于水。” “我们正在开发可以运送人员和货物并与其他Roboats连接的Roboats船队,以形成一系列实现水上活动的自治平台。”
无人驾驶船已经能够运输小物品多年,但是由于船只的当前尺寸,增加人类乘客感觉有些无形。Roboat II是不断发展的工作中的“半规模”船,与先前开发的1米长的四分之一规模Roboat并驾齐驱。第三部分,正在阿姆斯特丹建造,被认为是“全尺寸”,长4米,目标是运载四至六名乘客。
在功能强大的算法的辅助下,Roboat II自主导航了阿姆斯特丹的运河三个小时,收集了数据,然后以0.17米(或不到7英寸)的误差幅度返回了起始位置。
“开发能够精确地图绘制,鲁棒控制和人类运输的自动船系统是在完整的Roboat系统中实施该系统的关键一步,”有关Roboat的新论文的高级作者王伟(Wei Wang)说。二。“我们还希望它将最终在其他船只中实施,以使其具有自主性。”
为了协调船只之间的通信,由MIT CSAIL和Senseable City Lab组成的另一个团队(由Wang领导)提出了一种新的机器人协调控制策略。
为了将自己组装成相互连接的多单元火车(向儿童火车远距离致敬),“集体运输”采取了不同的方式来完成各种任务。该系统使用分布式控制器,该控制器是传感器,控制器和在整个系统中分布的相关计算机的集合),以及受蚁群如何无需沟通即可运输食物的策略。具体来说,所连接的机器人之间没有直接通信,只有一个领导者知道目的地。领导者启动移动到目的地,然后其他机器人可以估计领导者的意图,并相应地调整其运动。
Roboat II在最新研究的帮助下已扩大规模以探索运输任务。其中包括用于同步定位和映射(SLAM)的新算法,称为非线性模型预测控制器的基于模型的最优控制器以及称为移动视域估计的基于优化的状态估计器。图片来源:麻省理工学院
Senseable市实验室主任Ratti说:“目前的协作算法很少考虑在水面上使用动态系统。” “使用水上运输工具的团队进行的协同运输提出了在空中或地面运输工具中未遇到的独特挑战。例如,运输工具的惯性和负载变得更加重要,使系统难以控制。地面车辆,并以此验证算法。”
该团队在两种情况下测试了他们的控制方法:一种情况是三个机器人串联连接,另一种情况是三个机器人并联连接。结果表明,协作小组能够跟踪两种配置中的各种轨迹和方向,并且追随者的力量对小组产生了积极的作用-表明追随者机器人帮助了领导者。
Wang与斯坦福大学博士学位一起撰写了有关集体运输的论文。学生Zijian Wang,麻省理工学院的博士后Luis Mateos,麻省理工学院的研究员Kuang Wei Huang,斯坦福大学助理教授Mac Schwager,Ratti和Rus。
Roboat II
2016年,麻省理工学院的研究人员测试了一个原型,该原型可以“沿着运河中的预先设定的路径向前,向后和横向移动”。三年后,该团队的机器人通过自动断开连接并重新组装为各种配置,被更新为“变形”。
现在,Roboat II在最新研究的帮助下已扩大规模以探索运输任务。其中包括用于同步定位和映射(SLAM)的新算法,称为非线性模型预测控制器的基于模型的最优控制器以及称为移动视域估计的基于优化的状态估计器。
它是这样工作的:当用户需要在特定位置进行乘客接送任务时,系统协调员会将任务分配给最接近乘客的空船。当Roboat II接载乘客时,它将根据当前的交通状况为到达所需目的地创建一条可行的路径。
然后,重量超过50公斤的Roboat II将通过运行SLAM算法并利用激光雷达和GPS传感器以及用于定位,姿态和速度的惯性测量单元,开始进行自身定位。然后,控制器跟踪来自计划器的参考轨迹,该轨迹将更新路径,以避免检测到障碍物,从而避免潜在的碰撞。
研究小组指出,自上次更新以来,控制算法的改进使障碍看起来不再像巨型冰山。SLAM算法为Roboat提供了更高的定位精度,并允许在导航过程中进行在线映射,而这是以前的迭代中所没有的。
增大Roboat的尺寸还需要更大的面积来进行实验,该实验始于MIT池,然后移至查尔斯河,该河穿过马萨诸塞州的波士顿和剑桥。
尽管在类似城市的拥挤道路上行驶都会使驾驶员感到被困在迷宫中,但运河在很大程度上避免了这种情况。尽管如此,航道中仍会出现棘手的情况。鉴于此,该团队正在努力开发更有效的计划算法,以通过应用主动物体检测和识别来提高Roboat对环境的了解,从而使船舶能够处理更复杂的情况。该小组计划估计诸如水流和波浪之类的干扰,以进一步改善在嘈杂水域中的跟踪性能。
罗斯说:“所有这些预期的发展都将被纳入全尺寸Roboat的第一个原型,并在阿姆斯特丹市的运河中进行测试。”
集体运输
自从该领域诞生以来,就一直希望将机器的直观能力变为现实,从用于拾取物品的简单命令到在团队中进行组织的细微差别。
该项目的主要目标之一是使自组装能够完成上述收集废物,运送物品和在运河中运送人员的任务,但是控制这种在水上的运动一直是一个具有挑战性的障碍。机器人技术中的通信通常可能不稳定或有延迟,这可能会使机器人的协调性恶化。
用于这种集体运输的许多控制算法都需要直接通信,组中的相对位置以及任务的目的地,但是团队的新算法只需要一个机器人就能知道所需的轨迹和方向。
通常,在每个机器人上运行的分布式控制器都需要所连接结构的速度信息(由结构中心的速度表示),但这需要每个机器人都知道相对于结构中心的相对位置。在团队的算法中,他们不需要相对位置,并且每个机器人都只使用其局部速度而不是结构中心的速度。
当领导者发起移动到目的地时,其他机器人可以因此估计领导者的意图并调整他们的运动。领导者还可以通过调整其输入来操纵其余机器人,而无需在任何两个机器人之间进行任何通信。
将来,该团队计划使用机器学习来估计(在线)机器人的关键参数。他们还旨在探索自适应控制器,当将物体放在船上时,该控制器可以动态改变结构。最终,这些船还将扩展到存在水流和海浪等大扰动的室外水环境。