现代机器人通常需要智能,高效地与人互动,这可以通过为他们提供感知触摸的能力来实现。然而,先前模仿人类皮肤的尝试涉及笨重且复杂的电子设备,布线以及损坏的风险。在最近的一项研究中,日本研究人员通过构建3D视觉引导的人造皮肤来克服这些困难,该人造皮肤能够实现高性能的触觉传感,为医学,医疗保健和工业中的无数应用打开了大门。
自从最初用于高速自动化的机器人以来,它已经走了很长一段路。如今,在医学,康复,农业和海上航行中可以找到各种各样的机器人角色。由于这些角色中的许多角色都需要人与人之间的联系,因此,机器人有望变得擅长以安全和智能的方式与人互动。
实现此目标的一种方法是赋予机器人感知触摸的能力。因此,已经进行了尝试开发能够诱发触觉并允许机器人以与人类相同的方式更多地意识到其周围环境的人造“皮肤”。然而,尽管触觉传感器技术取得了巨大进步,但是这种努力仍然具有挑战性。日本高级科学研究所副教授何凡安说:“主要挑战在于模仿天然皮肤结构固有的复杂性,这种结构具有特别高的机械感受器密度,并具有诸如感知压力,振动,温度和疼痛等特殊功能。”和技术,他领导着一个从事软触觉技术研究的实验室。他补充说,“
在发表于IEEE Transactions on Robotics的一项新研究中,何教授和他的同事Lac Van Duong(JAIST的博士生)开发了一种高性能,基于视觉的低成本人工传感系统,该系统具有相对简单的结构,并且可扩展。这个名为TacLINK的系统可以处理触觉信息,甚至可以在与周围环境互动时确定接触力和接触几何形状。
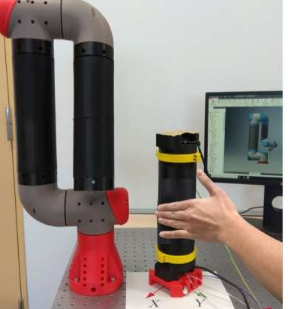
研究人员将TacLINK的结构基本建立在透明的丙烯酸管(用作刚性骨骼框架)上,该管被连续的柔软人造皮肤覆盖,感应面积约为500 cm 2。由于其高弹性和光滑度,他们使用硅橡胶来制造人造皮肤。此外,可以对材料充气以改变其形式和刚度。研究人员在皮肤表面上打印了一系列标记,以追踪其变形,而不是在皮肤内嵌入传感器或电子组件。这大大降低了其体积,成本和可能的损坏机会。
视觉系统由两个同轴摄像头组成,这些摄像头布置成一个立体摄像头,该摄像头跟踪皮肤内壁上标记的3-D位移。此外,研究人员采用了有限元模型(FEM)来估计皮肤的结构刚度。通过合并来自这两个来源的数据,他们能够同时重建接触几何形状和接触力分布。而且,与以前的研究不同,此方法适用于多个接触点。
有了如此积极的成果,何教授对创建下一代支持触摸感应的机器人设备充满希望。“人造皮肤在我们的研究中使用的方法可以很容易地通过铸造方法制造,因此可以在机器人的其他部件(例如手指,腿,胸部和头部)上实施,甚至可以在人类的智能假肢上使用,从而使残疾人能够感知Ho教授兴奋地说道:“此外,它还可以用于设计医学,医疗保健和工业领域的各种传感设备。实际上,它特别适用于后COVID时代的机器人系统的开发,以实现具有机器人化身的远程服务。”