为了在各种不熟悉的环境中自主运行并成功完成任务,移动机器人应该能够适应周围环境的变化。视觉教学和重复 (VT&R) 系统是训练机器人自适应导航环境的一类很有前途的方法。
顾名思义,VT&R 系统基于两个关键阶段:示教和重复步骤。在示教步骤中,系统从人工操作员的路径演示中学习。随后,在重复阶段,机器人试图复制人类在演示中所做的事情,尽可能自主地沿着相同的路径行走。
牛津机器人研究所的研究人员最近开发了一种新的控制器,可以帮助增强 VT&R 系统。他们的方法发表在IEEE Robotics and Automation Letters上的一篇论文中,可以帮助开发更擅长在陌生环境中导航的机器人。
“最近的论文是我们关于 VT&R 导航工作的一部分,”作者之一 Matias Mattamala 告诉 TechXplore。“这对于快速部署机器人以检查新地点和收集数据很有用,而无需构建精确的环境地图。在我们之前的工作中,我们通过在机器人上的不同摄像头之间切换来证明对视觉遮挡的鲁棒性,例如当有人正在路过。”
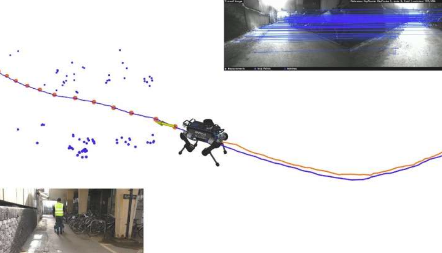
从机器人周围的局部地图计算出的有符号距离场 (SDF) 用于产生排斥力以远离障碍物,尤其是在狭窄的走廊中。红色意味着更接近障碍物,蓝色意味着更远。学分:马塔马拉、切布罗鲁和法伦。
在他们之前的研究中,马塔马拉和他的同事能够使用他们在人类演示期间收集的数据训练模型在不同时间访问机器人上的不同摄像头。尽管取得了这一显著成就,但他们的模型不允许机器人在复制人类代理所展示的轨迹时主动避开周围环境中的潜在障碍。
“我们前段时间开始研究这个‘安全层’ ,我们最近的论文展示了它的全部功能,”马塔马拉解释道。“我们的控制器基于 Nvidia 最近开发的一种称为黎曼运动策略(RMP) 的方法。”
研究人员开发的控制器部分类似于潜在的现场控制器,这些工具允许机器人计算不同力的组合,例如吸引力(即驱动它们完成目标的力)和排斥力(即帮助它们完成目标的力)。远离障碍物),最终确定前进的方向。然而,Nvidia 的 RMP 方法使他们的控制器更进了一步,因为它引入了动态权重(称为度量),以不同的方式利用这些力,具体取决于状态机器人。
“例如,你不需要总是避开障碍物,而只有当你靠近它们或指向它们的方向时,”马塔马拉解释道。“通过这种方式,可以防止某些吸引力和反作用力相互抵消的情况。”
团队控制器处理的相互作用力是根据动态生成的本地地图计算得出的,并随着机器人在其周围环境中的移动而适应。通过分析这个本地地图,系统可以生成易于解释的字段,并可用作数据来增强机器人的导航技能。这包括表征障碍物的有符号距离场 (SDF) 和表示到目标或目标位置的最近距离的地盘距离场 (GDF)。在处理这些字段时,控制器会考虑到周围环境中存在机器人无法移动或穿越的一定空间。
“在我们的研究中,我们能够探索新的控制技术,如 RMP,到目前为止,这些技术只应用于机器人操纵器或小型轮式机器人,”Mattamala 说。“此外,我们在ANYbotics 的ANYmal 四足机器人上部署了我们的控制器,并在一个退役矿井中进行了闭环实验,测试起来非常令人兴奋。”
与之前提出的其他方法相比,由 Mattamala 及其同事创建的控制器本质上是反应式的,因为它不需要机器人和开发人员提前计划并预测机器人在特定环境中会遇到的障碍。有趣的是,在他们的评估中,该团队发现通过使用更好的环境表示来产生吸引力和反作用力,他们可以获得与提前计划任务的模型所获得的结果相似的结果。
“例如,我们放置了一些障碍物阻挡参考路径,机器人能够在没有计划的情况下四处走动,”马塔马拉解释道。“我们还扩展了我们的 VT&R 系统以与鱼眼相机配合使用,例如我们在实验中使用的Sevensense Alphasense 装备。我们取得了与之前使用 Realsense 相机进行的实验相当的结果,这证明了我们系统的灵活性。”
到目前为止,研究人员已经在一系列室内杂乱的空间和地下矿井中测试了他们的控制器。在这些初步实验中,他们的系统取得了非常有希望的结果,这表明它可以很快帮助增强现有和新开发的移动机器人的导航能力。值得注意的是,该控制器可以应用于各种系统,因为它只需要使用深度相机或激光雷达技术收集的数据生成的本地地图。
图 6:团队计划在未来工作中测试机器人自主导航的一些环境。这些是在测试由 Siddhant Gangapurwala 开发的 RLOC 步行控制器时拍摄的一些照片示例。图片来源:Gangapurwala。图片由奥利弗·巴利特拍摄。
在接下来的研究中,马塔马拉和他的同事计划在他们实验室开发的其他机器人上应用和测试他们的控制器。此外,他们希望在更广泛的动态真实环境中评估其性能。
“我们未来的工作考虑扩展我们的 VT&R 系统,以实现有腿机器人在工业和自然环境中的长期视觉导航,”Mattamala 解释说。“这需要 (1) 更好的视觉定位系统,因为由于照明或天气条件导致的剧烈外观变化将挑战我们当前的系统,以及 (2) 更好的步行控制器来实现在崎岖地形中的可靠导航,这应该与高层交互导航。想象一下,教机器人穿越森林小径或沿着山路徒步旅行,然后自主地重复轨迹,无论地形或天气如何——这就是我们的目标。”