发表在 2022 年 4 月的IEEE Robotics and Automation Letters上的一篇论文概述了 AMBER 团队的方法,并代表了将混合零动力学 (HZD)(一种用于产生稳定运动的数学框架)与肌肉骨骼模型相结合来控制机器人辅助装置的第一个实例行走装置。
肌肉骨骼模型是一种无创测量肌肉力和关节接触力之间关系的计算工具。HZD 目前用于为双足机器人创建稳定的步行步态,肌肉模型表示在给定关节配置下肌肉拉伸或收缩的程度。
该团队在电池供电的电动假肢上展示了其方法。电池为电机供电,电机转动关节。电机运动由研究人员开发的数学算法决定。
为了创建这种数学算法,AMBER 研究团队记录了一个人带着假肢行走的肌肉活动,该假肢遵循单独使用 HZD 生成的所需运动。这是使用肌电图 (EMG) 完成的,其中一个电极放置在特定肌肉上方的皮肤上。然后,该团队分析了一个带着假肢行走的人的 EMG 活动,该假肢遵循 HZD 结合肌肉模型产生的所需运动。后者更类似于人类在没有假肢的情况下行走的方式。
“人类在没有假肢的情况下行走的肌肉活动模式是我们想要接近的,”机械和土木工程专业的研究生 Rachel Gehlhar 说。将肌肉骨骼模型直接嵌入优化问题(最终生成假肢步态的算法)为生成感觉更自然的步态提供了基础。
“如果你正在为机器人辅助设备设计轨迹,那么令人满意的步态不仅应该是稳定的,而且应该感觉自然,”计算和神经系统专业的研究生 Amy Li 说。轨迹代表研究人员希望假肢装置如何随时间移动。
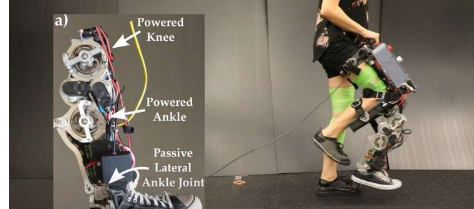
“控制机器人的一种方法是描述每个关节的期望运动,”机械和土木工程专业的研究生 Maegan Tucker 补充道。在这种情况下,机器人是腿假肢。膝关节和踝关节响应发送到电机的命令,遵循各自的轨迹。“我们的假肢装置有两个驱动关节:膝盖和脚踝。因此,随着时间的推移,这些关节的期望运动和速度就是我们告诉机器人做的事情。”
信用:琥珀实验室
一个令人惊讶的发现是,HZD 和肌肉模型的结合产生了比预期更快的所需步行步态。强制机器人模型遵循肌肉-肌腱关系的模式会进一步限制步态生成优化问题,因此人们可能会认为该问题更难解决。但是有了这些额外的约束,在优化问题的迭代次数减少后,就形成了稳定的步行步态。
“我们的假设是,组合模型有助于将优化问题引导至解决方案,从而导致自然行走,”塔克说。“换句话说,额外的约束有助于引导优化问题更快地走向稳定和更自然的步态。”
这项工作有助于弥合使用算法产生所需步行运动的方法与通常不重叠的生物力学领域之间的差距。由此产生的合作使 AMBER 实验室更接近于将自然运动转化为像假肢这样的机器人辅助设备,并有可能应用于截瘫患者的全身外骨骼设备。